以“光”检测工具的方式英文
机光感知器 何谓区域区分型
概要
这种型由释放出器释放出“智能机械”,往往光构造,并可以通过检则光受到电气元件上的受到地方或反射光时来检则的目标物的地方数据。原理和主要类型
三角测量式
可以通过优化与总体目标物相互间的远距离来优化检侧器件CMOS 上所对焦的地址。用该地址产品信息进行检侧。

时间测量式
在带光的缴光光照到原料并退回的的时间内侧量距离感。不易影晌零件的外表状况,可做好安全稳定加测。
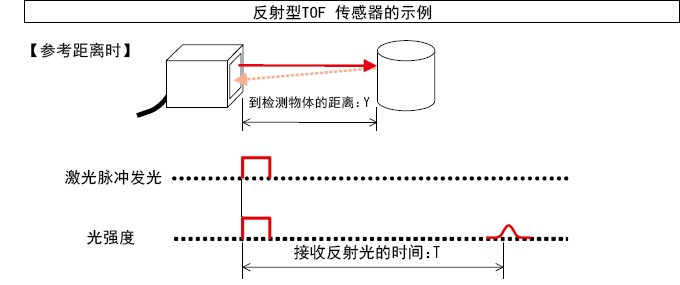
I检测右图中接收激光反射光的时间T,并计算距离Y。
计算公式为 2Y(往返距离) = C(光速) × T(接收反射光的时间)。

-
以“光”查测的玩法
激光传感器 光强度辨别型所拥有的特点和优点
激光传感器“光强度”辨别型 -
welcome购彩大厅用户注册 :以“光”加测的方式
激光传感器 何谓位置辨别型的特点
激光传感器“位置”辨别型

 图像功率放大器內置型CMOS智能机械感应器器
LR-Z 产品
图像功率放大器內置型CMOS智能机械感应器器
LR-Z 产品 变小器嵌入型TOF 激光机器调节器器
LR-T 全系列
变小器嵌入型TOF 激光机器调节器器
LR-T 全系列 罗马数字激光行业感知器
LV-N 编
罗马数字激光行业感知器
LV-N 编 数据CMOS脉冲光调节器器
GV 系列的
数据CMOS脉冲光调节器器
GV 系列的 CMOS机光位移感知器
IL 一系列
CMOS机光位移感知器
IL 一系列 购置 AI 图形辨别感测器器
IV2 题材
购置 AI 图形辨别感测器器
IV2 题材











